 |
| 風(fēng)力機(jī)調(diào)速方式 | |||
| Adjust the Speed Mode | |||
風(fēng)是不穩(wěn)定的,不但會(huì)影響發(fā)電機(jī)的輸出,在強(qiáng)風(fēng)時(shí)還會(huì)燒毀發(fā)電機(jī),甚至摧毀風(fēng)力機(jī)。所以風(fēng)力機(jī)要有應(yīng)付風(fēng)速大幅度變化的能力,還要有對(duì)付強(qiáng)風(fēng)速(超過切出風(fēng)速)的安全防范措施。 |
|||
| 偏轉(zhuǎn)風(fēng)輪調(diào)速 | |||
在風(fēng)力增強(qiáng)時(shí)使風(fēng)輪偏轉(zhuǎn)為側(cè)面向風(fēng)是一些小型風(fēng)力機(jī)采用的抗強(qiáng)風(fēng)方式,圖1是一種向上仰頭的小型風(fēng)力機(jī),發(fā)電機(jī)(含風(fēng)輪)通過風(fēng)輪上仰構(gòu)件連接尾舵,上仰構(gòu)件通過一個(gè)水平橫軸安裝在偏轉(zhuǎn)平臺(tái)上。其特點(diǎn)是尾舵桿向上翹起,在尾端有尾舵, 尾舵與地面垂直或略向前傾。 在正常工作風(fēng)力時(shí)尾舵僅起偏航(對(duì)風(fēng))作用,發(fā)電機(jī)在尾舵作用下通過偏航平臺(tái)下面的軸承繞塔桿轉(zhuǎn)動(dòng),實(shí)現(xiàn)對(duì)風(fēng),風(fēng)輪以正常轉(zhuǎn)速運(yùn)行。 |
|||
輪向上偏轉(zhuǎn)調(diào)速風(fēng)力機(jī)") |
|||
| 圖1--風(fēng)輪向上偏轉(zhuǎn)調(diào)速風(fēng)力機(jī) | |||
當(dāng)風(fēng)力超過額定風(fēng)速時(shí),尾舵在大風(fēng)作用下,繞風(fēng)輪的上仰橫軸向下方偏轉(zhuǎn),帶動(dòng)風(fēng)輪向上偏轉(zhuǎn)(仰頭),風(fēng)輪有效受風(fēng)面積減小,限制了風(fēng)輪轉(zhuǎn)速上升,見圖2。當(dāng)風(fēng)減小時(shí),風(fēng)輪向水平方向偏轉(zhuǎn),風(fēng)輪有效受風(fēng)面積增大,轉(zhuǎn)速不會(huì)明顯下降。這樣,在風(fēng)力超過額定風(fēng)速但不超過切出風(fēng)速時(shí),通過仰頭調(diào)節(jié)風(fēng)輪受風(fēng)面積,使風(fēng)速變化對(duì)風(fēng)輪轉(zhuǎn)速影響較小,可保持風(fēng)輪轉(zhuǎn)速在較小范圍內(nèi)變化,見圖2。 |
|||
時(shí)風(fēng)輪向上偏轉(zhuǎn)") |
|||
| 圖2--大風(fēng)時(shí)風(fēng)輪向上偏轉(zhuǎn) | |||
當(dāng)超過切出風(fēng)速時(shí),尾舵被壓向最下方,此時(shí)風(fēng)輪面接近水平,受風(fēng)面積接近零,風(fēng)輪停止旋轉(zhuǎn),進(jìn)入保護(hù)狀態(tài),見圖3。 |
|||
風(fēng)時(shí)風(fēng)輪偏向水平") |
|||
| 圖3--強(qiáng)風(fēng)時(shí)風(fēng)輪偏向水平 | |||
| 下面請(qǐng)觀看偏轉(zhuǎn)風(fēng)輪調(diào)速風(fēng)力機(jī)運(yùn)行動(dòng)畫,動(dòng)畫格式.mp4;分辨率640×480 | |||
|
|||
偏轉(zhuǎn)風(fēng)輪的還有其他方式:尾舵直接固定在偏航平臺(tái)上,只起對(duì)風(fēng)作用,發(fā)電機(jī)(含風(fēng)輪)的上仰橫軸在發(fā)電機(jī)下方,安裝在偏航平臺(tái)上,依靠彈簧的力量使發(fā)電機(jī)軸在水平狀態(tài),這也是正常風(fēng)速時(shí)的狀態(tài)。大風(fēng)時(shí)風(fēng)輪在推力增大到一定程度,克服彈簧力量,風(fēng)輪面向后傾斜,有效受風(fēng)面積減小,限制了風(fēng)輪轉(zhuǎn)速上升;風(fēng)減小后,風(fēng)輪在彈簧作用下返回水平位置。工作過程與靠尾舵仰頭的風(fēng)力機(jī)相似。 也可把發(fā)電機(jī)的偏轉(zhuǎn)軸設(shè)在側(cè)面,同上面結(jié)構(gòu)類似,在彈簧作用下發(fā)電機(jī)軸與尾舵桿平行,尾舵桿固定在偏航平臺(tái)上,保持在對(duì)風(fēng)狀態(tài),此時(shí)風(fēng)輪面向來風(fēng),處于正常工作狀態(tài)。大風(fēng)時(shí)風(fēng)輪在推力增大到一定程度,克服彈簧力量,風(fēng)輪面向側(cè)面傾斜,有效受風(fēng)面積減小,限制了風(fēng)輪轉(zhuǎn)速上升;風(fēng)減小后,風(fēng)輪在彈簧作用下返回正常位置。 這種靠風(fēng)輪偏轉(zhuǎn)來改變有效受風(fēng)面積進(jìn)行調(diào)速的方式簡單可行,在小型與微型風(fēng)力發(fā)電機(jī)中得到應(yīng)用。 |
|||
| 失速控制轉(zhuǎn)速 | |||
其實(shí)風(fēng)力機(jī)葉片本身也有一定的調(diào)速能力,在風(fēng)速增大,葉片進(jìn)入失速狀態(tài)也可限制轉(zhuǎn)速上升,許多小型風(fēng)力發(fā)電機(jī)工作在定槳變速模式。 葉片固定在輪轂上,正常運(yùn)行時(shí)風(fēng)小轉(zhuǎn)速低、風(fēng)大轉(zhuǎn)速高,當(dāng)風(fēng)速增大轉(zhuǎn)速超過額定轉(zhuǎn)速時(shí),則通過失速來扼制轉(zhuǎn)速的飆升、保護(hù)發(fā)電機(jī),稱這種運(yùn)行方式為定槳變速加失速模式,這種模式在中型風(fēng)力機(jī)也有應(yīng)用。下面來分析一下這種失速控制轉(zhuǎn)速模式的基本原理。 圖4是一幅翼型的升力系數(shù)與阻力系數(shù)隨攻角的變化曲線圖,在曲線中可看出,翼型在攻角α大于11度時(shí)開始失速,升力驟然下降,阻力大幅上升,開始失速的攻角α的值稱為失速角。 |
|||
與阻力系數(shù)曲線") |
|||
| 圖4--翼型的升力系數(shù)與阻力系數(shù)曲線圖 | |||
圖5是一臺(tái)風(fēng)力機(jī)槳葉的截面(翼型)受力分析圖,該翼型弦線與風(fēng)輪旋轉(zhuǎn)平面的固定夾角β稱為槳距角,對(duì)于固定漿葉槳距角是不變的。相對(duì)翼型的風(fēng)速是外來風(fēng)速v與翼型線速度u合成的相對(duì)風(fēng)速w,相對(duì)風(fēng)速w與翼型弦線間的夾角α是翼型的攻角。 圖5左圖是翼型運(yùn)行在允許的風(fēng)速之內(nèi)(額定風(fēng)速)時(shí)狀態(tài),翼型的攻角α應(yīng)小于失速角(11度)。翼型升力Fl與阻力Fd的合力為F1,F(xiàn)1在風(fēng)輪旋轉(zhuǎn)平面上的投影F就是推動(dòng)翼型運(yùn)動(dòng)的力。風(fēng)速v低時(shí)攻角小,則F小就轉(zhuǎn)速低;風(fēng)速v高時(shí)攻角大,則F大就轉(zhuǎn)速高。 當(dāng)風(fēng)速超過額定風(fēng)速大幅度上升時(shí),風(fēng)輪轉(zhuǎn)速由于負(fù)荷不可能大幅度上升時(shí),翼型因攻角α大于11度后進(jìn)入失速狀態(tài),圖2右圖就表示了這一狀態(tài)。盡管風(fēng)速v加大許多,但升力Fl卻下降了、阻力Fd大大增加了,結(jié)果是F反而減小了,從而抑制了轉(zhuǎn)速的上升。 |
|||
速的定槳變速") |
|||
| 圖5--采用失速控制轉(zhuǎn)速的定槳變速示意圖 | |||
失速是翼型運(yùn)行在非正常狀態(tài),是不穩(wěn)定的狀態(tài);而且失速角也不是一成不變的,它受到空氣濕度、溫度等變化的影響,例如空氣濕度增大或槳葉上附有灰塵時(shí)失速角就會(huì)減小、升力系數(shù)就會(huì)下降;再說翼型失速后再返回失速前的攻角時(shí)并不是沿原曲線返回,所以失速是不可能穩(wěn)定的控制轉(zhuǎn)速,失速控制的范圍也是有限的。為了在低風(fēng)時(shí)起動(dòng)風(fēng)力機(jī),葉片要有一定的攻角,這會(huì)減小風(fēng)輪運(yùn)行葉尖速比范圍,影響風(fēng)力機(jī)效率的發(fā)揮。 采用定槳失速方式可在一定范圍內(nèi)防止風(fēng)輪轉(zhuǎn)速的急速上升,但并不具有抗強(qiáng)風(fēng)能力。要抗強(qiáng)風(fēng)要求葉片必須有足夠的強(qiáng)度、風(fēng)輪有良好的剎車性能,在強(qiáng)風(fēng)來臨時(shí)把風(fēng)輪側(cè)面向風(fēng)、剎車,才能有效減小強(qiáng)風(fēng)帶來的損失。 但這種模式運(yùn)行的風(fēng)力機(jī)結(jié)構(gòu)簡單,造價(jià)低是其優(yōu)點(diǎn)。 |
|||
| 變槳距調(diào)節(jié)轉(zhuǎn)速 | |||
變槳距調(diào)節(jié)轉(zhuǎn)速是當(dāng)前大中型風(fēng)力機(jī)廣泛使用的調(diào)速技術(shù),可使風(fēng)力機(jī)在風(fēng)速超過額定風(fēng)速時(shí),風(fēng)力機(jī)轉(zhuǎn)速穩(wěn)定在額定轉(zhuǎn)速。圖6就是變槳距翼型受力分析圖,圖6左圖是翼型在額定風(fēng)速時(shí)運(yùn)行在額定轉(zhuǎn)速時(shí)的狀態(tài),與圖6左圖所示狀態(tài)一樣,此時(shí)有最大的推力F。圖6右圖是翼型運(yùn)行在高風(fēng)速時(shí)的情況,如果翼型角度不變就會(huì)進(jìn)入嚴(yán)重的失速狀態(tài),但此時(shí)翼型的槳距角β增加了Δβ,使攻角α維持在不失速狀態(tài),調(diào)節(jié)合適的Δβ可使推力F與失速前一樣。這就是通過變槳距角來調(diào)節(jié)風(fēng)輪轉(zhuǎn)速的方式。 |
|||
節(jié)轉(zhuǎn)速") |
|||
| 圖6--變槳距調(diào)節(jié)轉(zhuǎn)速示意圖 | |||
有變槳距調(diào)節(jié)轉(zhuǎn)速功能的風(fēng)力機(jī)在低于額定風(fēng)速時(shí),工作在定槳變速狀態(tài)(需要時(shí)也可工作在變槳變速狀態(tài));在風(fēng)速超過額定風(fēng)速就要工作在變槳定速狀態(tài)。顯然,只有在額定風(fēng)速或超出額定風(fēng)速時(shí)才可能實(shí)現(xiàn)風(fēng)力機(jī)轉(zhuǎn)速的穩(wěn)定。 大中型風(fēng)力發(fā)電機(jī)多是直接并網(wǎng)的工作狀態(tài),要保證發(fā)電機(jī)轉(zhuǎn)速要與電網(wǎng)頻率同步,實(shí)際上靠變槳來實(shí)現(xiàn)風(fēng)力機(jī)轉(zhuǎn)速非常穩(wěn)定是困難的,除非在風(fēng)速穩(wěn)定(風(fēng)速變化緩慢)的地區(qū)。 現(xiàn)在流行的是變速變槳模式,所謂變速就是指發(fā)電機(jī)在較低的風(fēng)速較以低的轉(zhuǎn)速時(shí)開始發(fā)電,轉(zhuǎn)速隨風(fēng)速增加,一直到額定風(fēng)速,此時(shí)雖未進(jìn)入失速狀態(tài)但仍可選擇合適的槳距角使發(fā)電機(jī)輸出最大功率;當(dāng)風(fēng)速超過額定風(fēng)速時(shí)則通過增大槳距角以保持轉(zhuǎn)速穩(wěn)定在額定轉(zhuǎn)速附近,使輸出功率穩(wěn)定在一定范圍內(nèi)。此時(shí)可通過雙饋發(fā)電機(jī)使輸出頻率與電壓與電網(wǎng)頻率與電壓相同;或通過逆變器使輸出頻率與電壓與電網(wǎng)頻率與電壓相同,達(dá)到所謂變速恒頻運(yùn)行模式。所以說變速變槳模式使風(fēng)力機(jī)從低風(fēng)到較高的風(fēng)力下均可發(fā)電,大大提高了風(fēng)力發(fā)電的效率。 完整的變槳距調(diào)節(jié)系統(tǒng)在遇到強(qiáng)風(fēng)時(shí)可把槳葉調(diào)為順風(fēng)狀態(tài),即葉片的主要段弦線與風(fēng)輪軸線平行,稱為全順槳狀態(tài),此時(shí)葉片迎風(fēng)面積最小,風(fēng)輪受風(fēng)力作用大大減小,而且葉片的阻力可使風(fēng)輪迅速停轉(zhuǎn)(空氣動(dòng)力學(xué)剎車),有效地保護(hù)風(fēng)力機(jī)安全。 |
|||
| 離心力槳距調(diào)節(jié)裝置 | |||
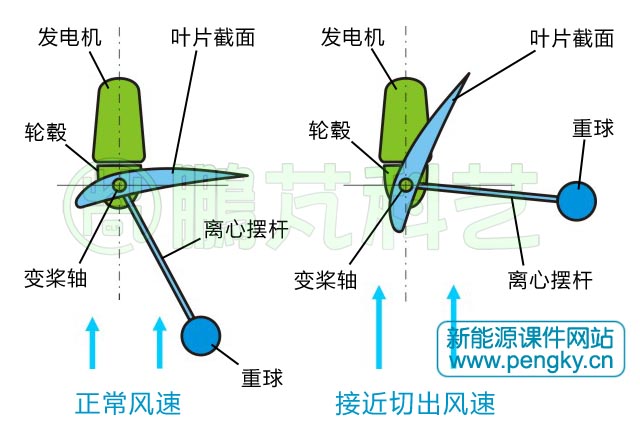
| 下面介紹一種簡單的槳距角調(diào)節(jié)方法,在風(fēng)輪輪轂上按120度分布3個(gè)變槳軸套,3個(gè)葉片的根部通過軸承安裝在3個(gè)變槳軸套內(nèi),可在軸套內(nèi)自由旋轉(zhuǎn);軸套內(nèi)有彈簧與限位裝置,使風(fēng)輪葉片處于正常工作角度,見圖7。圖中左圖是風(fēng)力機(jī)正面圖,右圖是風(fēng)力機(jī)透視圖,圖8是葉片軸線方向的視圖,左圖清楚地顯示了此時(shí)葉片的角度。 在額定風(fēng)速以下時(shí),離心擺錘所受離心力在繞葉片轉(zhuǎn)軸方向的力矩不足以克服彈簧力,葉片保持在正常工作的槳距角。 | |||
節(jié)槳距角的風(fēng)力機(jī)") |
|||
| 圖7--離心力調(diào)節(jié)槳距角的風(fēng)力機(jī) | |||
 |
|||
| 圖8--離心力調(diào)節(jié)槳距角風(fēng)力機(jī)原理 | |||
| 當(dāng)風(fēng)速超過額定風(fēng)速時(shí),離心擺錘所受離心力增大,在繞葉片轉(zhuǎn)軸方向的力矩克服彈簧力使槳距角增大,使風(fēng)輪轉(zhuǎn)速增幅大大減慢,直到切出風(fēng)速,離心擺錘使葉片槳距角增大到接近順槳位置,見圖8右圖。圖9顯示了接近順槳的狀態(tài),在左邊正視圖有一個(gè)紅色的圓圈,表示此時(shí)離心擺錘距風(fēng)輪軸線的距離(離心擺錘的旋轉(zhuǎn)半徑),顯然比圖7左邊圖的紅色的圓圈半徑大得多,這就是離心擺錘在高轉(zhuǎn)速時(shí)增大旋轉(zhuǎn)半徑使葉片偏轉(zhuǎn)的原理。 | |||
節(jié)槳距角風(fēng)力機(jī)的順槳狀態(tài)") |
|||
| 圖9--離心力調(diào)節(jié)槳距角風(fēng)力機(jī)的順槳狀態(tài) | |||
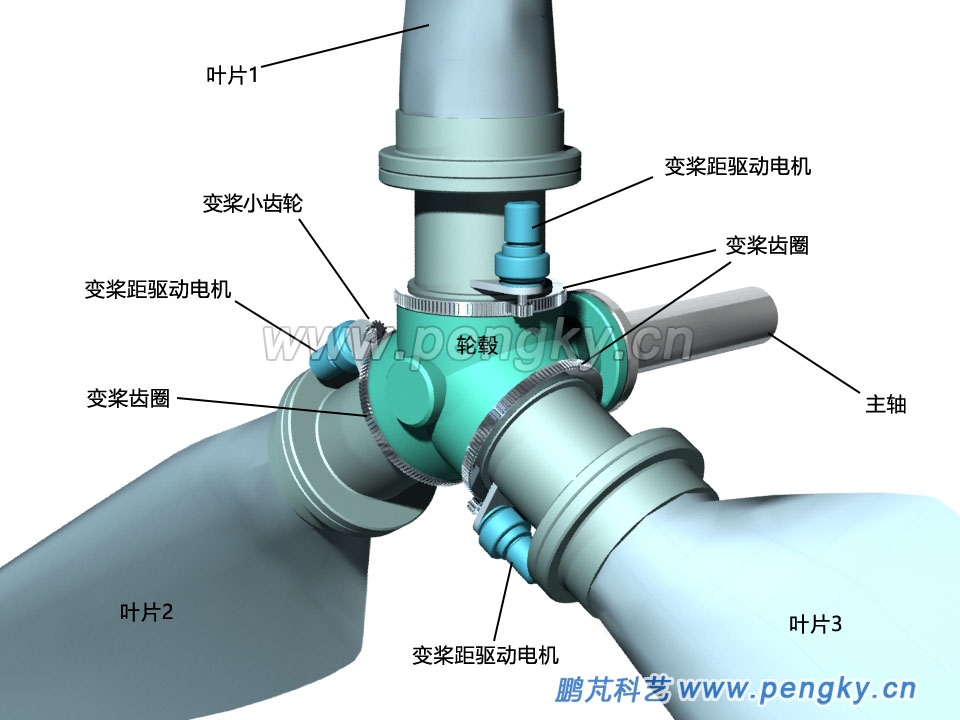
離心力槳距調(diào)節(jié)裝置較簡單,但在超出切處風(fēng)速時(shí)仍不停高速旋轉(zhuǎn),需輔以葉片轉(zhuǎn)角鎖定機(jī)構(gòu)在強(qiáng)風(fēng)時(shí)把葉片鎖在順槳狀態(tài),方可使風(fēng)力機(jī)停轉(zhuǎn),保證風(fēng)力機(jī)的安全。離心力槳距調(diào)節(jié)裝置可用在小型風(fēng)力發(fā)電機(jī)中。 在較大的風(fēng)力發(fā)電機(jī)中采用統(tǒng)一變槳距機(jī)構(gòu)或獨(dú)立變槳距系統(tǒng),通過電動(dòng)或液壓驅(qū)動(dòng)變槳,采用計(jì)算機(jī)進(jìn)行控制,才能實(shí)現(xiàn)真正的變槳調(diào)速功能,圖10是電動(dòng)變槳距系統(tǒng)的圖片。 |
|||
 |
|||
| 圖10--電動(dòng)變槳距系統(tǒng) | |||

| 返回上一頁 | Back to Previous Page | |||
 |
||||