
| 風(fēng)的測量 |
| Wind Measurements |
風(fēng)是由空氣流動引起的一種自然現(xiàn)象,風(fēng)主要指空氣的水平方向流動,太陽輻射熱是造成空氣壓力變化的主要原因,典型風(fēng)類有海陸風(fēng)、山谷風(fēng)、季風(fēng)、信風(fēng)等。風(fēng)的主要參數(shù)是大小與方向。 可通過儀器來測量風(fēng)力的大小與方向。根據(jù)測量原理主要有以下幾類:機械式、超聲波式、聲振蕩、壓力式與熱線式、激光雷達(dá)、微波雷達(dá)等,在一般場合用得較多的是機械式與超聲波式,特別是在風(fēng)力發(fā)電機中使用廣泛。在風(fēng)力發(fā)電中也稱這些儀器為風(fēng)速傳感器與風(fēng)向傳感器。 |
| 機械式測風(fēng)儀 |
風(fēng)速測量儀器也叫風(fēng)速傳感器,最簡單又常見的風(fēng)速測量是三杯式風(fēng)速儀,三個風(fēng)杯由于阻力差而旋轉(zhuǎn),風(fēng)力大則轉(zhuǎn)速高,儀器內(nèi)的轉(zhuǎn)速傳感器把風(fēng)杯轉(zhuǎn)速變?yōu)殡娦盘栞敵觥D1就是三杯式風(fēng)速儀外形圖,其原理參見風(fēng)杯式阻力差風(fēng)力機課件。 。 |
圖1--三杯式風(fēng)速儀-風(fēng)速傳感器 |
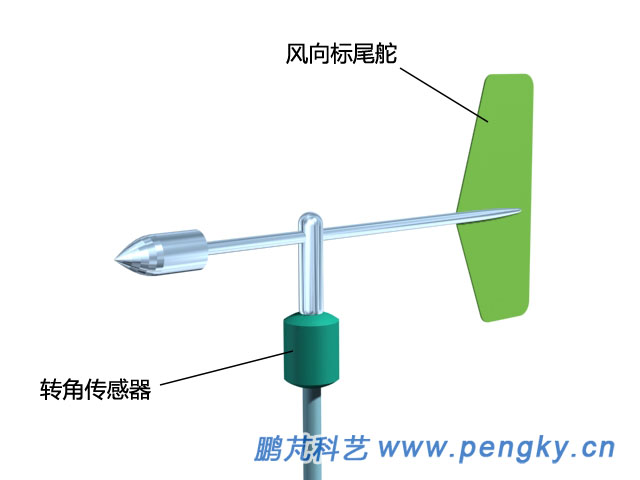
最簡單又常見的風(fēng)向測量是風(fēng)向標(biāo),也叫風(fēng)向傳感器,其原理不言而喻。其指向的角度由儀器內(nèi)的角度傳感器轉(zhuǎn)變?yōu)殡娦盘栞敵觥D2就為風(fēng)向標(biāo)外形圖。 |
圖2--風(fēng)向標(biāo)-風(fēng)向傳感器 |
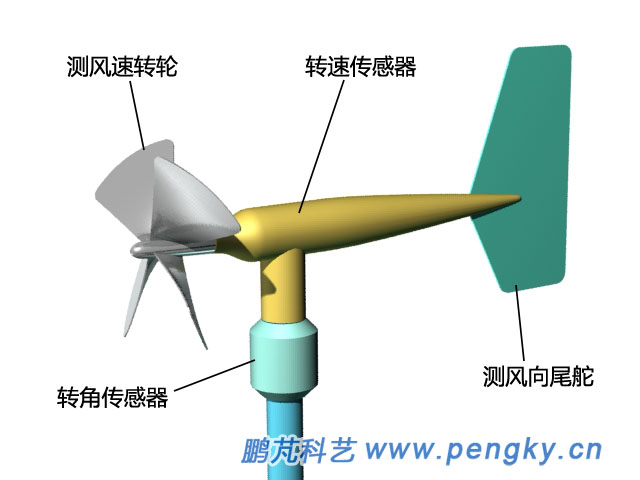
圖3是是一種同時可測量風(fēng)速與風(fēng)向的儀器,儀器前方有測量轉(zhuǎn)速的漿葉,漿葉隨風(fēng)速加大而增高,儀器后方有隨風(fēng)而擺的翼片,儀器內(nèi)有轉(zhuǎn)速傳感器與角度傳感器分別把風(fēng)速與風(fēng)向轉(zhuǎn)換為電信號輸出。圖3就是該種儀器的外形圖。 |
圖3--風(fēng)速風(fēng)向傳感器 |
機械式測風(fēng)儀結(jié)構(gòu)簡單、價格低廉;缺點是有旋轉(zhuǎn)件,存在磨損損耗,易被風(fēng)沙磨損,冰凍雨雪會影響運行,需定期維護(hù)。 |
| 超聲波式風(fēng)速風(fēng)向儀 |
超聲波風(fēng)速風(fēng)向儀也叫超聲波風(fēng)速風(fēng)向傳感器,有多種測量計算方法,其中傳播時差法簡單也用得較多。時差法通過超聲波在空氣中的傳播速度來測量風(fēng)速,順風(fēng)傳播速度快,逆風(fēng)傳播速度慢,風(fēng)速為零時雙向速度一樣。圖4就是一個超聲波風(fēng)速風(fēng)向儀,在上方有四個超聲波探頭,每個探頭即可發(fā)送超聲波也能接受超聲波,相對的兩個探頭是一組。每一組探頭可測出相對方向的風(fēng)速,兩組探頭聯(lián)合則可測出具體的風(fēng)速與風(fēng)向。 |
圖4--超聲波風(fēng)速風(fēng)向傳感器 |
超聲波式風(fēng)速風(fēng)向儀最大優(yōu)點是無機械摩損,缺點是尺寸大些,雨、雪、霜、霧、沙塵會影響測量,使輸出誤差加大。采用探頭加熱技術(shù),可防止冰雪對傳感器造成的影響,以適合在惡劣天氣條件下使用。 大型風(fēng)力機都安裝有風(fēng)向與風(fēng)速測量傳感器,風(fēng)向傳感器向風(fēng)力機偏航控制器實時提供信號,控制器驅(qū)動偏航電機保證風(fēng)力機準(zhǔn)確對風(fēng);風(fēng)速傳感器向風(fēng)力機控制器提供風(fēng)速信號,控制器根據(jù)風(fēng)速、負(fù)荷調(diào)整槳距角,使風(fēng)力機運行在最佳狀態(tài)。 |
激光測風(fēng)雷達(dá) |
近些年激光測風(fēng)雷達(dá)技術(shù)進(jìn)展較快,開始在風(fēng)力發(fā)電機組安裝應(yīng)用,有關(guān)介紹見多普勒測風(fēng)激光雷達(dá)課件。 |


| 返回上一頁 | Back to Previous Page |
