 |
| 多普勒測風激光雷達 |
| DoppIer Wind Lidar |
在水平軸風力機欄目風的測量課件中介紹了幾種常用的測風傳感器,近幾年 測風激光雷達開始用于風力發(fā)電機測風,我國金風集團在6MW的風力發(fā)電機組中采用了激光雷達測風。下面介紹測風激光雷達的基本原理。 |
| 多普勒效應(yīng) |
測風激光雷達是建立在多普勒效應(yīng)理論基礎(chǔ)上,下面介紹什么是多普勒效應(yīng)。 在1842年,奧地利數(shù)學家、物理學家多普勒路過鐵路旁,一列火車從他身旁馳過,他發(fā)現(xiàn)火車從遠方駛來時汽笛聲變響,音調(diào)升高,而火車駛離時汽笛聲變?nèi)酰粽{(diào)降低。視頻1演示了這個現(xiàn)象(視頻來自網(wǎng)絡(luò))。 |
| 視頻--多普勒效應(yīng)-運動火車汽笛聲 |
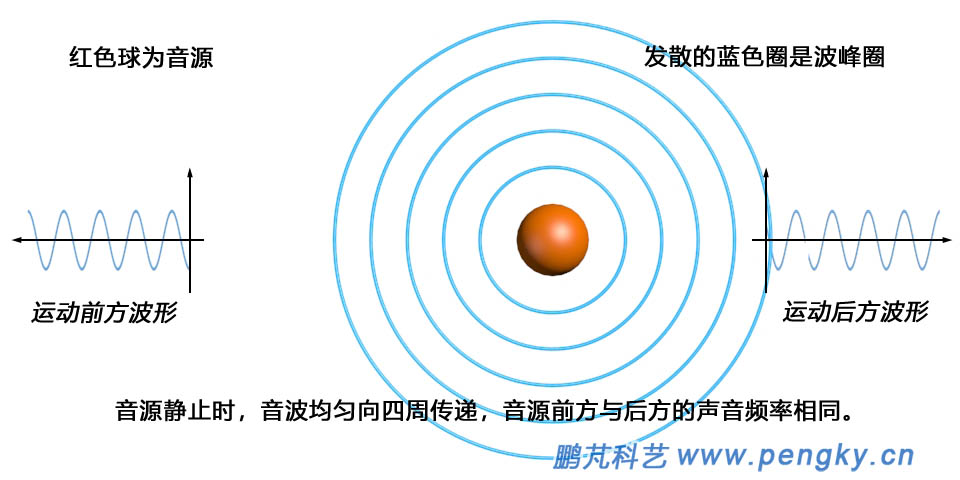
這個物理現(xiàn)象引起多普勒極大興趣,經(jīng)過研究得出如下結(jié)論。 聲源向觀測者運動時,聲波的波長減小(頻率升高),音調(diào)升高;當聲源離開觀測者而去時,聲波的波長增加(頻率降低),音調(diào)降低。 在圖1中,音源(橙紅色小球)靜止時,在音源前方聽到的聲音與音源后方聽到的聲音頻率相同。 |
|
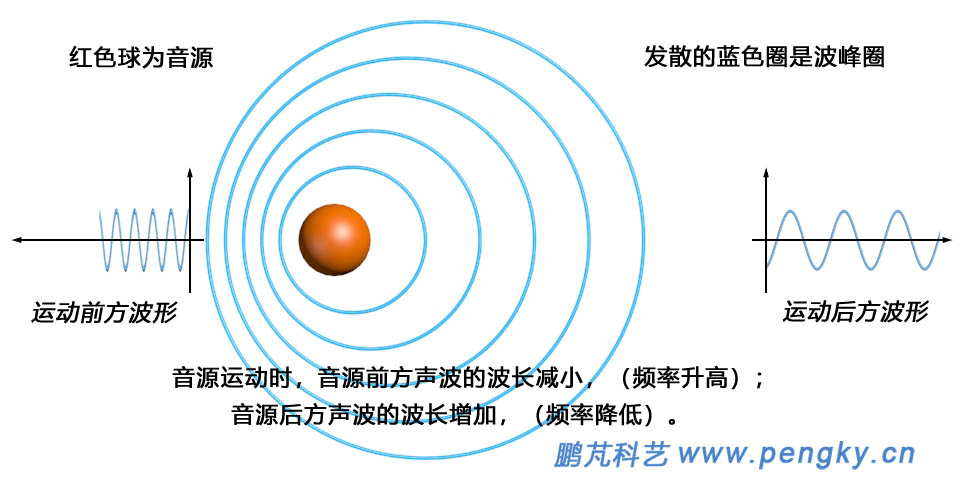
圖2是音源向前方移動時,在音源前方聽到的聲音頻率比音源后方聽到的聲音頻率要高。 |
|
下面的動畫演示這一現(xiàn)象。注:動畫僅表示音源靜止與運動時前方與后方聲音頻率的不同,并不表現(xiàn)頻率變化的過程。 |
| 動畫—多普勒效應(yīng)演示動畫 |
 |
音調(diào)的變化同聲源與觀測者間的相對速度和聲速的比值有關(guān)。這一比值越大,改變就越顯著,這就是“多普勒效應(yīng)”,由此產(chǎn)生的頻率變化稱為多普勒頻移。 多普勒效的數(shù)學公表達式: 觀察者和發(fā)射源的頻率關(guān)系為 |
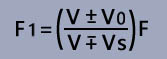 |
F1 為觀察到的頻率; 多普勒效應(yīng)不僅適用于聲波、對無線電波與光波同樣適用。 |
| 激光雷達測風原理 |
在空中含有許多氣溶膠顆粒,是指均勻分散于大氣中的固體微粒和液體微粒,例如霧、煙、霾、微塵和煙霧等。測風激光雷達向空中發(fā)射激光束,激光照射到這些氣溶膠顆粒會產(chǎn)生反射,運動顆粒的反射波會出現(xiàn)多普勒頻移,頻移值為發(fā)射波與反射波頻率之差。 在圖3中,激光雷達發(fā)射的激光波與地面垂直線的夾角為φ,激光遇到氣溶膠顆粒會會產(chǎn)生反射,激光雷達接受到反射波后進行處理。通過發(fā)射波與接受波氣溶膠顆粒時間差得到氣溶膠顆粒與雷達的距離L 氣溶膠顆粒的高度h=L·cosφ |
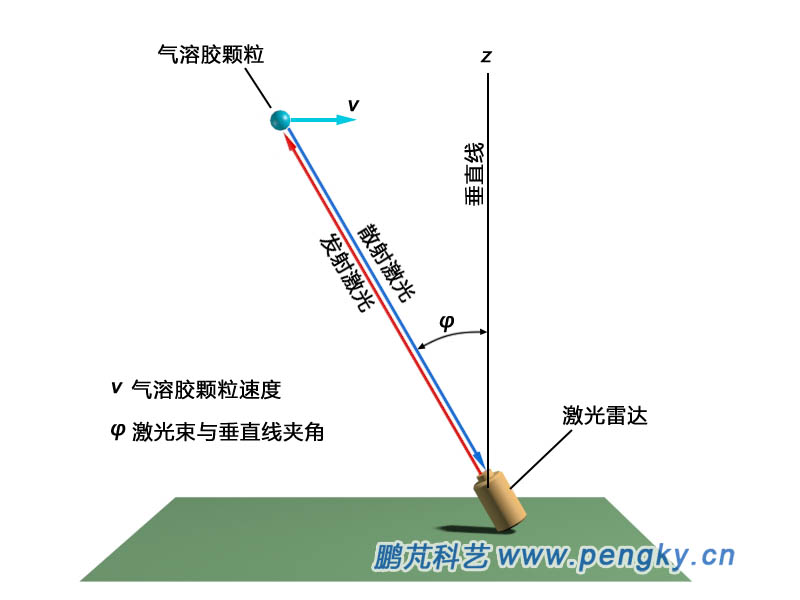 |
| 圖3--激光雷達測風原理 |
氣溶膠顆粒的水平移動速度V僅是朝向激光雷達垂直線z方向的速度,并不是實際的風向與風速。要得到實際的風向風速通常使用3維激光測風雷達。 |
| 3維激光測風雷達 |
采用所謂圓錐掃描技術(shù)的3維激光測風雷達非常實用于低空風場的測量。激光測風雷達向空中發(fā)射3束或更多的激光束。 圖4是發(fā)射3個激光束的激光測風雷達,3個激光束與激光雷達垂直軸Z的夾角都為φ,3個激光束在水平面的夾角為120度,測風平面的高度h。根據(jù)前面介紹的原理,可以同時測得3 個方向相對Z軸的風速Ve,Vnnw,Vssw,把這3個風速矢量進行合成,就可得到此刻h高度上的水平風速與風向。 |
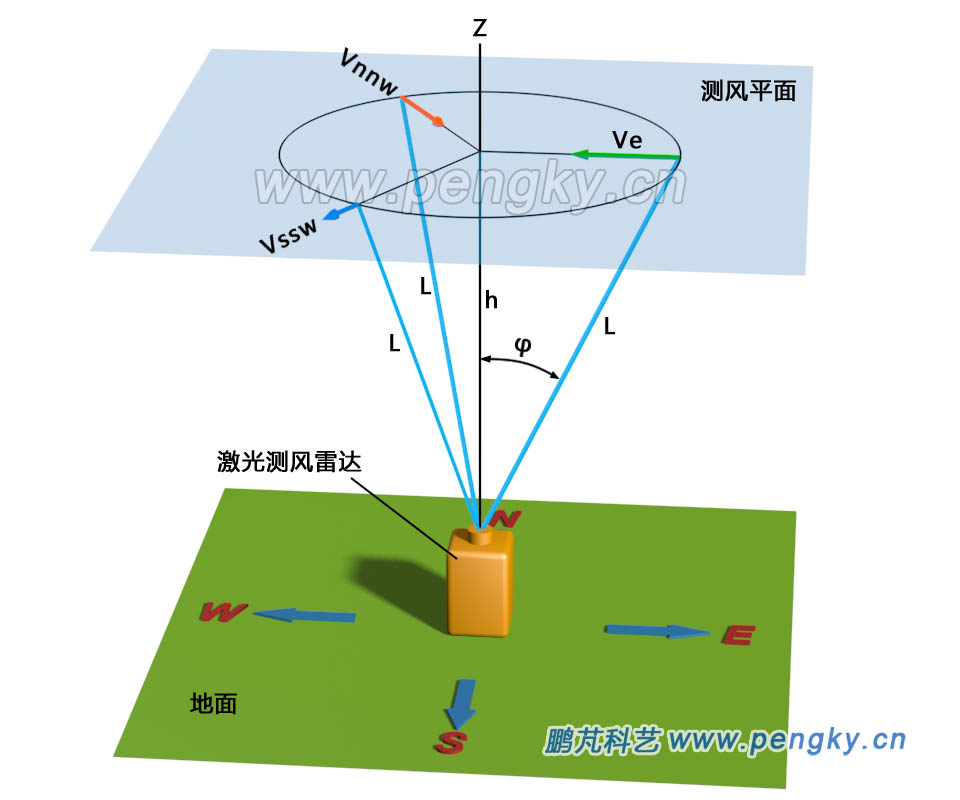 |
| 圖4--3維激光測風雷達原理 |
3個或多激光束個通常由一個激光發(fā)射接受器旋轉(zhuǎn)掃描完成。 看起來視乎很簡單,實際上非常復(fù)雜,大氣中滿是氣溶膠顆粒,反射的波非常復(fù)雜,是大量反射波的疊加,如何從海量的雜波中選出所需的波是非常復(fù)雜的技術(shù),要使用精密的模擬與海量的數(shù)字處理技術(shù)方可解決。所以目前激光測風雷達的造價還十分昂貴,但隨著器件性能的提升,價格會逐漸降低。 由于激光雷達可測任意高度的風場,而且是實時監(jiān)控,非常方便。一些激光雷達可測十幾公里高的風場,在機場,火箭、導(dǎo)彈發(fā)射場首先得到應(yīng)用,不過要測高空某點的風況,可能要幾個激光雷達在不同位置同步測量方可準確。 目前風電場的評估也開始使用激光測風雷達,比起建測風塔還是方便許多,特別是海上漂浮式激光測風系統(tǒng)可免去建海上測風塔的困難,在歐洲已開始使用海上漂浮式激光測風系統(tǒng),據(jù)報道國內(nèi)剛購進兩臺試用。 |
| 激光測風雷達在風力機中的應(yīng)用 |
風力發(fā)電機組通常在機艙上部安裝機械式測風裝置,由于安裝在風輪后面,受到旋轉(zhuǎn)葉片的遮擋,葉片的尾流對風速與風向影響都較大,這些滯后與不準確的數(shù)據(jù)使風力機無法運行在最佳狀態(tài)。采用激光測風雷達可測得風輪前方數(shù)十米至數(shù)百米的風況,高度從地面到數(shù)百米均可檢測。 圖5是風力機測風雷達測風示意圖,在機艙上部安裝的激光測風雷達,雷達對風力機前方進行掃描,圖中表示上下左右的掃描激光束,淺紅色圓錐是激光束掃描測風的空間。其原理與3維激光測風雷達相同,只是方向變?yōu)樗剑嬎惴椒ㄓ兴兓选? |
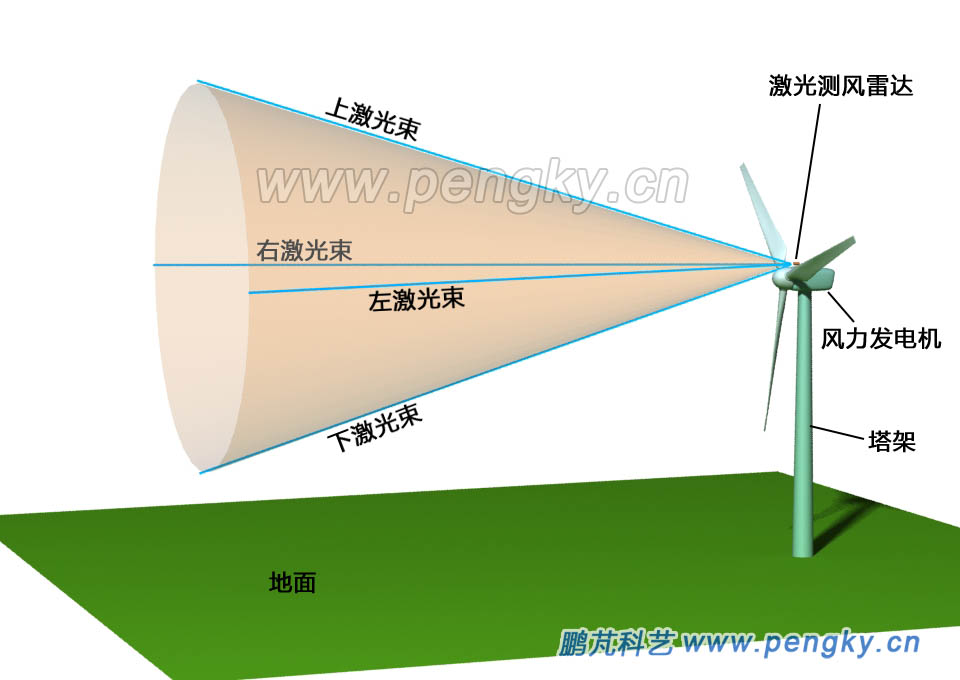 |
| 圖5—風力機激光測風雷達示意圖 |
這些數(shù)據(jù)讓風力機提前預(yù)知來風狀況,為風力機控制作好預(yù)前準備,達到最佳運行效果,不但可以提高風力機的效率,還可風力機對突變的來風做好應(yīng)急準備,減小受損可能。激光雷達測風技術(shù)使風力發(fā)電機組的控制走向智能化。 據(jù)報道國內(nèi)已有部分風電企業(yè)在進行相關(guān)試驗,金風科技已在6MW的風力發(fā)電機組中使用了激光雷達測風技術(shù)。 圖6是網(wǎng)絡(luò)上的激光測風雷達,左圖是3維激光測風雷達,右圖是安裝在機艙上的風力機機載激光測風雷達。 |
 |
| 圖6--激光測風雷達照片 |
圖7是網(wǎng)絡(luò)上的歐洲漂浮式激光測風系統(tǒng)照片 |
 |
| 圖7--歐洲海面漂浮式激光測風系統(tǒng) |
| 返回上一頁 | Back to Previous Page | |||
 |
||||