
| 電磁感應(yīng)轉(zhuǎn)速傳感器 |
| Electromagnetic Induction Speed Sensor |
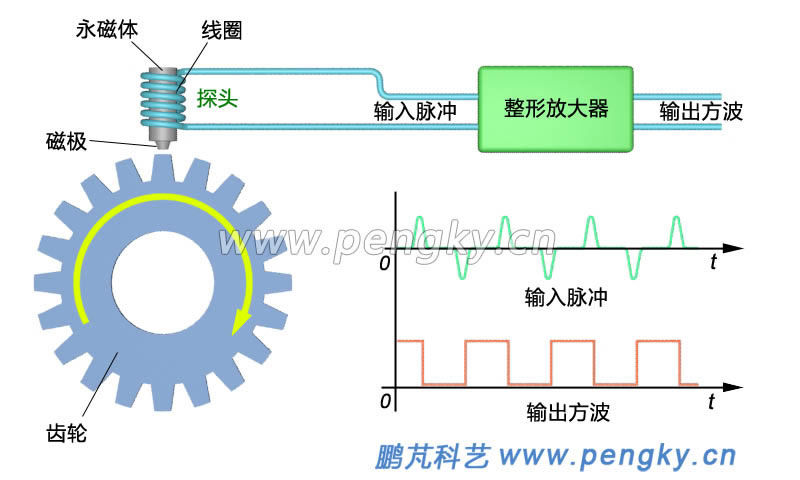
電磁感應(yīng)轉(zhuǎn)速傳感器應(yīng)用非常廣泛,本課件介紹其工作原理。 傳感器采用電磁感應(yīng)原理,在被測(cè)軸端安裝一個(gè)軟磁性鐵質(zhì)齒輪,齒輪與被測(cè)物體同軸旋轉(zhuǎn),在齒輪的外圓周安裝探頭,見(jiàn)圖1。探頭由一個(gè)圓柱形永磁體鐵芯與線圈組成,線圈繞在鐵芯上,當(dāng)齒輪的齒對(duì)著探頭時(shí),鐵芯的磁通變大,當(dāng)齒輪的齒槽對(duì)著探頭時(shí),鐵芯的磁通變小。 當(dāng)齒輪旋轉(zhuǎn)時(shí),鐵芯的磁通周期變化,在探頭磁通增大時(shí)線圈輸出正脈沖,在探頭磁通減小時(shí)線圈輸出負(fù)脈沖,經(jīng)整形放大器輸出方波脈沖信號(hào),見(jiàn)圖1。 |
|
探頭每轉(zhuǎn)過(guò)一個(gè)齒就輸出一個(gè)方波脈沖,脈沖頻率與齒輪轉(zhuǎn)速成正比。圖中齒輪為20齒,若轉(zhuǎn)速為每秒80轉(zhuǎn),輸出脈沖頻率為1600Hz,這就是測(cè)量轉(zhuǎn)速的原理。 下面再用動(dòng)畫(huà)演示電磁感應(yīng)轉(zhuǎn)速傳感器原理。 |
| 動(dòng)畫(huà)1--電磁感應(yīng)轉(zhuǎn)速傳感器原理 |
 |
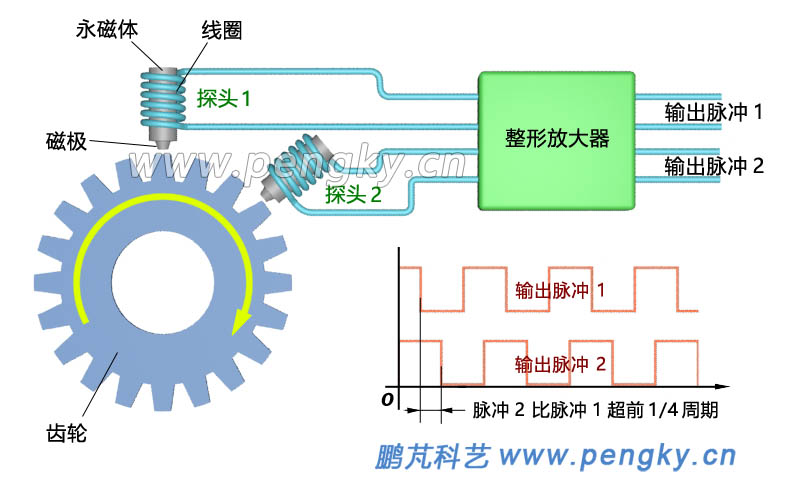
為了測(cè)出旋轉(zhuǎn)方向,還要增加一個(gè)探頭,兩個(gè)探頭相對(duì)齒的位置相差1/4個(gè)齒距,兩個(gè)探頭產(chǎn)生的脈沖就會(huì)相差1/4個(gè)周期。當(dāng)齒輪正向旋轉(zhuǎn)時(shí)脈沖1比脈沖2落后1/4周期,見(jiàn)圖2。 |
|
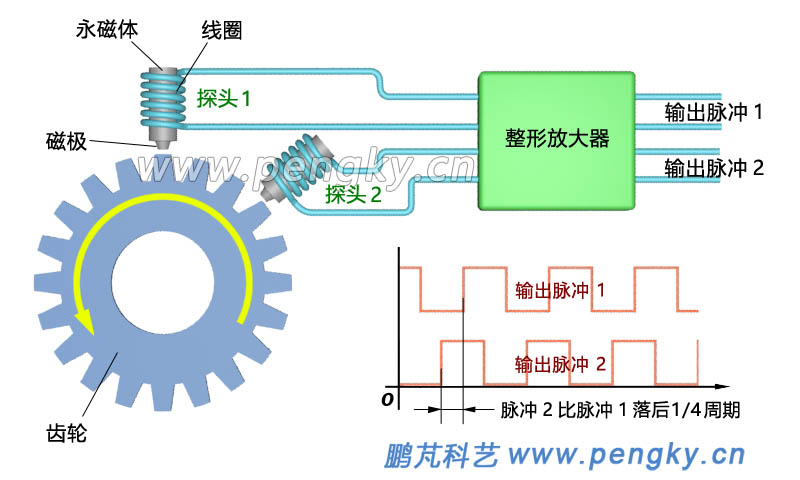
當(dāng)齒輪反向旋轉(zhuǎn)時(shí)脈沖2比脈沖1落后1/4周期,見(jiàn)圖3。 |
|
通過(guò)對(duì)兩個(gè)脈沖的相位比較,就知道旋轉(zhuǎn)方向了。 下面的動(dòng)畫(huà)直觀的演示了可測(cè)旋轉(zhuǎn)方向的電磁感應(yīng)轉(zhuǎn)速傳感器的原理。 |
| 動(dòng)畫(huà)2--可測(cè)旋轉(zhuǎn)方向的電磁感應(yīng)轉(zhuǎn)速傳感器原理 |
|
電磁感應(yīng)傳感器也可以測(cè)量直線運(yùn)動(dòng)速度,只需把齒輪換為齒條即可。 電磁感應(yīng)傳感器的優(yōu)點(diǎn)是簡(jiǎn)單,對(duì)溫度變化等環(huán)境條件要求不高,無(wú)需提供電源,工作穩(wěn)定可靠。 電磁感應(yīng)傳感器的缺點(diǎn)是無(wú)法測(cè)量低轉(zhuǎn)速,因?yàn)樗俣群艿蜁r(shí),探頭磁通變化率太小,線圈感應(yīng)電勢(shì)太小,不能正確測(cè)量;當(dāng)然速度太高超出工作頻率范圍也無(wú)法工作。采用磁敏電阻傳感器可以解決這個(gè)問(wèn)題 |
| 返回上一頁(yè) | Back to Previous Page |
