
| 步進電動機工作原理(2) |
| Stepping Motor Principle (2) |
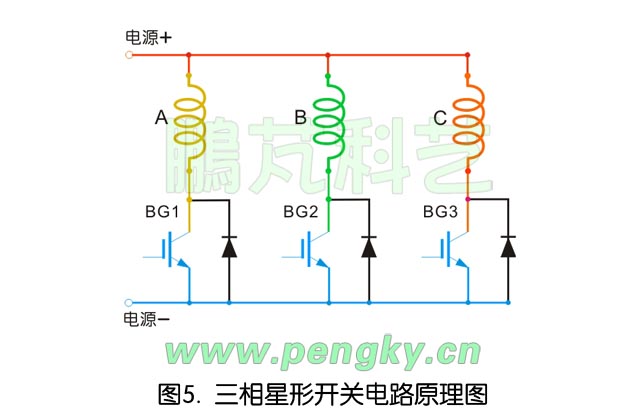
上接第一頁“步進電動機工作原理(1)” 為方便瀏覽,將第一節(jié)在的驅動器開關電路再顯示在下面: |
|
開關晶體管BG1連接A相線圈,開關晶體管BG2連接B相線圈,開關晶體管BG3連接C相線圈。下面的幾個圖片顯示在控制脈沖作用下驅動器對三相線圈輪流接通電源拉動轉子旋轉的狀態(tài)。 第一個控制脈沖來時,BG1截止BG2導通,B相線圈通電,磁通按最近的路徑閉合,在磁力拉動下,轉子開始向逆時針方向轉動,見圖8。 |
|
在磁力拉動下,轉子向逆時針方向轉動,圖9是轉到1.5度時的位置。 |
|
在磁力拉動下,轉子向逆時針方向轉動到3度,見圖10,如果不來控制脈沖,轉子將停止在這個角度不動,這樣一個控制脈沖驅動轉子轉了一步,一個步距角為3度。 |
|
| 如果再來一個控制脈沖,開關晶體管BG2截止BG3導通,C線圈通電,轉子在磁拉力作用下開始繼續(xù)轉動,見圖11。 |
|
| 在磁力拉動下,轉子向逆時針方向轉動到6度,見圖12,如果不來控制脈沖,轉子將停止在這個角度不動,這樣第二個控制脈沖驅動轉子又轉了一步,總共轉了6度,兩個步距角。 |
|
如果再來一個控制脈沖,開關晶體管BG3截止BG1導通,A線圈通電,轉子在磁拉力作用下開始繼續(xù)轉動,見圖13。 |
|
在磁力拉動下,轉子向逆時針方向轉動到9度,見圖14,此時狀態(tài)與初始位置圖7相同,轉子一共轉了3個步距角共9度,也就是轉子的一個齒距的角度—9度。 |
|
如果需要繼續(xù)轉動就繼續(xù)發(fā)控制脈沖,就重復圖8開始的過程。不停的發(fā)控制脈沖電機就會不停的旋轉,脈沖一停電機就停止轉動。需要反轉就改變?nèi)嗲袚Q順序,例如前面的過程是按A-B-C順序導通轉子逆時針轉動,改為C-B-A順序導通轉子則按順時針轉動。 控制脈沖頻率高則轉子轉速高、頻率低則轉子轉速低,可以非常低或靜止固定在指定位置。但轉子開始轉動與停止轉動時驅動器都要適當降低切換頻率,以防因負荷與轉子慣量引起的失步。 下面是該步進電動機轉動的動畫,步進電動機在走了7步后停了一會再走了7步,共轉動了42度。 |
| 步進電機原理動畫 |
 |
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
| 返回上一頁 | Back to Previous Page |
